Hardware
實體成果:硬體組裝
以麵包板快速搭建原型,無焊接即完成感測電路,Raspberry Pi 透過 GPIO I²C 直接驅動 MPU-6050。
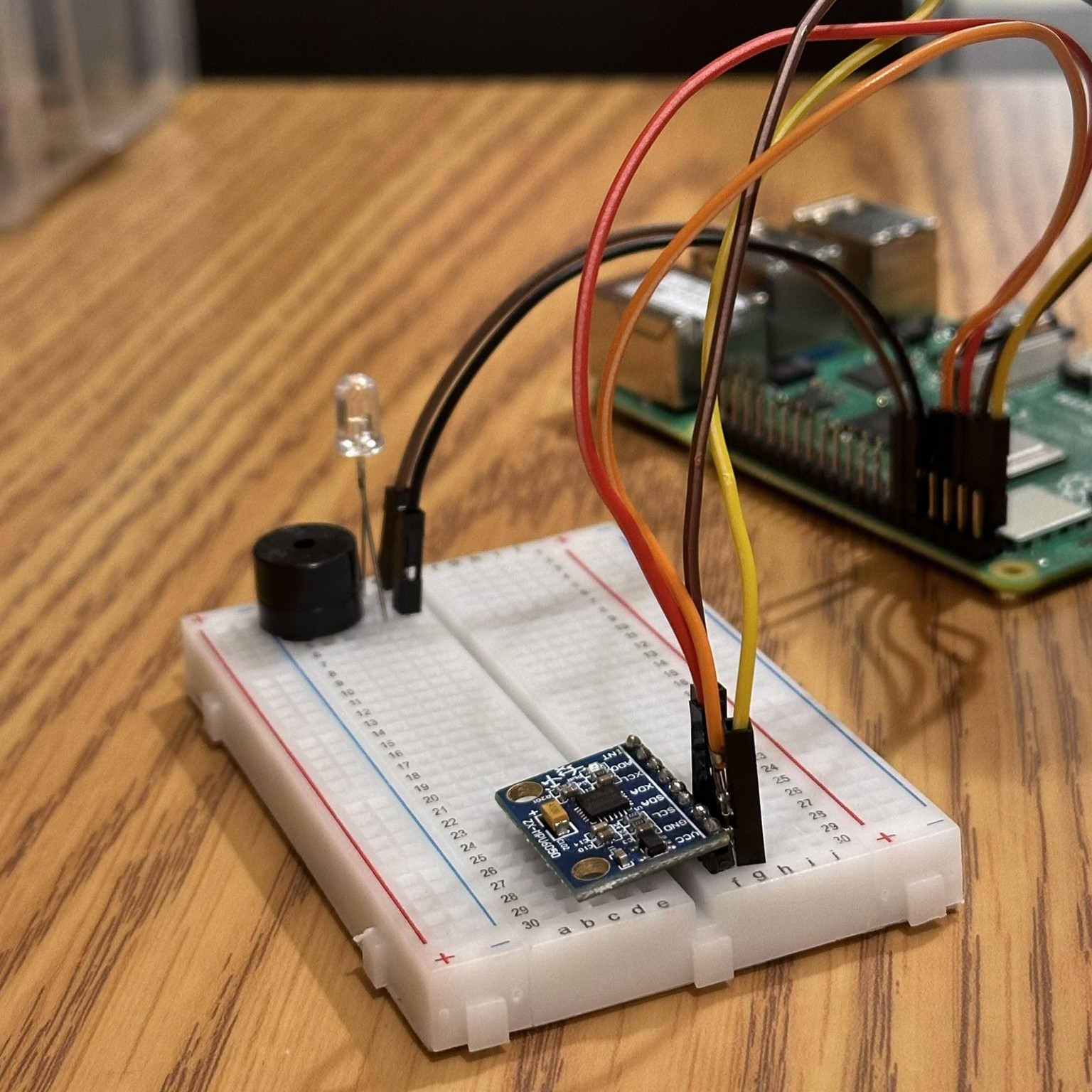
感測器模組
麵包板電路配置
MPU-6050 藍色模組插入麵包板中央,四色杜邦線(VCC / GND / SCL / SDA)接至 Raspberry Pi GPIO。
左側配備 LED 指示燈(超閾值閃爍)與蜂鳴器(同步鳴叫),構成聲光雙重警報機制。
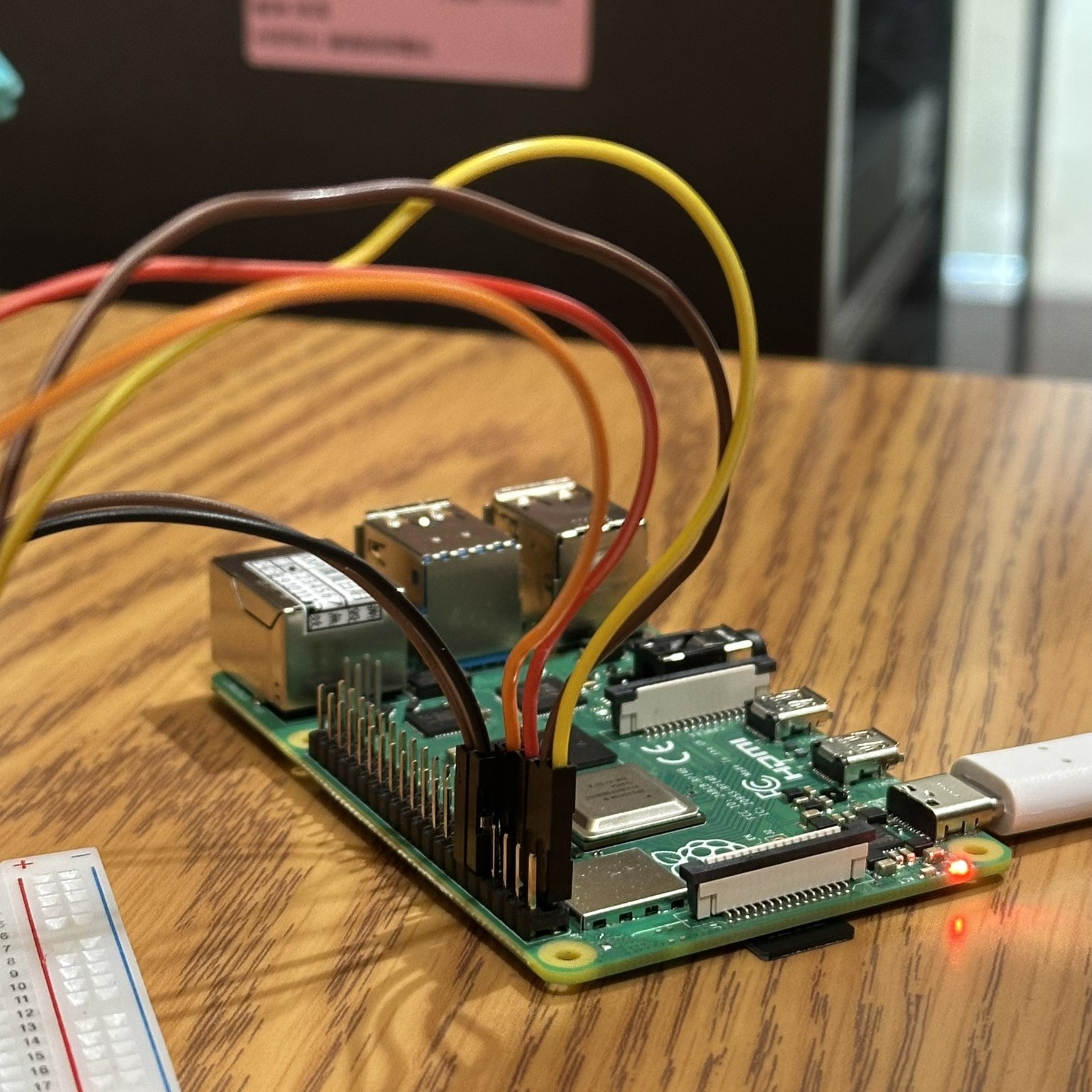
主控單元
Raspberry Pi 4 主板
右下角紅色 PWR 燈亮起表示系統正常上電。GPIO 排針已連接至麵包板,
開機後自動執行 Python 監控程式,以 I²C 匯流排持續讀取 MPU-6050 數據。